skimage.util#
通用工具。
此模組包含一些通用影像處理的實用函式。
在陣列上平行映射函式。 |
|
回傳顯示兩張影像差異的影像。 |
|
沿著每個維度,將陣列 |
|
回傳影像資料型別的強度限制,即 (最小值, 最大值) 元組。 |
|
將影像轉換為布林格式。 |
|
將影像轉換為浮點數格式。 |
|
將影像轉換為單精度 (32 位元) 浮點數格式。 |
|
將影像轉換為雙精度 (64 位元) 浮點數格式。 |
|
將影像轉換為 16 位元有號整數格式。 |
|
將影像轉換為 8 位元無號整數格式。 |
|
將影像轉換為 16 位元無號整數格式。 |
|
反轉影像。 |
|
為影像遮罩上的座標指定唯一的整數標籤 |
|
在 scikit-image 文件字串上執行關鍵字搜尋並列印結果。 |
|
將輸入陣列中的值從 input_vals 映射到 output_vals。 |
|
建立多個單通道或多通道影像的蒙太奇。 |
|
將各種隨機雜訊新增至浮點數影像的函式。 |
|
尋找沿著 |
|
回傳一個具有約 `n_points` 個均勻間隔非零像素的影像。 |
|
沿著給定軸切割影像。 |
|
從二維陣列中移除重複的列。 |
|
輸入 n 維陣列的區塊檢視 (使用重新跨步)。 |
|
輸入 n 維陣列的滾動視窗檢視。 |
- skimage.util.apply_parallel(function, array, chunks=None, depth=0, mode=None, extra_arguments=(), extra_keywords=None, *, dtype=None, compute=None, channel_axis=None)[原始碼]#
在陣列上平行映射函式。
將陣列分割成可能重疊的區塊,給定深度和邊界類型,在區塊上平行呼叫給定的函式,合併區塊並回傳產生的陣列。
- 參數:
- function函式
要映射的函式,它以陣列作為引數。
- arraynumpy 陣列或 dask 陣列
要套用函式的陣列。
- chunksint、tuple 或 tuple 的 tuple,可選
單一整數會被解讀為應在陣列上平鋪的方形區塊的一邊長度。長度為
array.ndim的一個 tuple 代表區塊的形狀,並在陣列上平鋪。長度為ndim的 tuple 的列表,其中每個子 tuple 都是沿著對應維度的區塊大小序列。如果為 None,則會根據可用 CPU 的數量將陣列分割成區塊。有關區塊的更多資訊,請參閱此處的文件。當channel_axis不為 None 時,tuple 的長度可以是ndim - 1,並且會沿著通道軸使用單一區塊。- depthint 或 int 序列,可選
新增邊界儲存格的深度。可以使用 tuple 來指定每個陣列軸的不同深度。預設為零。當
channel_axis不為 None,且提供長度為ndim - 1的 tuple 時,會沿著通道軸使用深度 0。- mode{‘reflect’, ‘symmetric’, ‘periodic’, ‘wrap’, ‘nearest’, ‘edge’},可選
外部邊界填補的類型。
- extra_argumentstuple,可選
要傳遞給函式的引數 tuple。
- extra_keywordsdictionary,可選
要傳遞給函式的關鍵字引數 dictionary。
- dtype資料類型或 None,可選
function輸出的資料類型。如果為 None,Dask 會嘗試透過在形狀為(1,) * ndim的資料上呼叫函式來推斷此資料類型。對於預期 RGB 或多通道資料的函式,這可能會出現問題。在這種情況下,使用者應手動指定此 dtype 引數。0.18 版新增: 0.18 版新增了
dtype。- computebool,可選
如果
True,則會主動計算並回傳 NumPy 陣列。如果False,則會延遲計算並回傳 Dask 陣列。如果None(預設值),則會根據提供的陣列類型 (對於 NumPy 陣列會主動計算,對於 Dask 陣列會延遲計算) 進行計算。- channel_axisint 或 None,可選
如果為 None,則假設影像為灰階 (單通道) 影像。否則,此參數會指出陣列的哪個軸對應到通道。
- 回傳:
- outndarray 或 dask 陣列
回傳套用運算的結果。類型取決於
compute引數。
注意事項
Numpy 邊緣模式 'symmetric'、'wrap' 和 'edge' 會轉換為對等的
dask邊界模式 'reflect'、'periodic' 和 'nearest'。設定compute=False對於鏈結稍後的操作可能很有用。例如,選取區域以預覽結果或將大型資料儲存到磁碟,而不是載入記憶體。
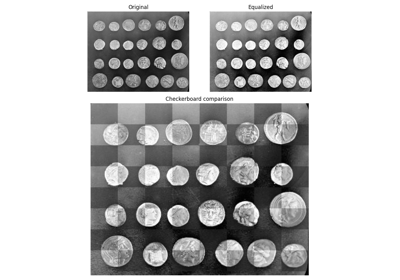
- skimage.util.compare_images(image0, image1, *, method='diff', n_tiles=(8, 8))[原始碼]#
回傳顯示兩張影像差異的影像。
0.16 版新增。
- 參數:
- image0, image1ndarray,形狀 (M, N)
要處理的影像,必須具有相同的形狀。
0.24 版變更:
image1和image2已分別重新命名為image0和image1。- method字串,可選
用於比較的Method。有效值為 {'diff', 'blend', 'checkerboard'}。詳細資訊請參閱注意事項一節。
0.24 版變更: 此參數和下列參數為僅限關鍵字。
- n_tilestuple,可選
僅用於
checkerboard方法。指定要將影像分割成的圖塊數量(行,列)。
- 回傳:
- comparisonndarray,形狀 (M, N)
顯示差異的影像。
注意事項
'diff'計算兩個影像之間的絕對差異。'blend'計算平均值。'checkerboard'建立尺寸為n_tiles的圖塊,交替顯示第一個和第二個影像。請注意,影像必須是二維的才能使用棋盤格方法進行比較。

- skimage.util.crop(ar, crop_width, copy=False, order='K')[原始碼]#
沿著每個維度,將陣列
ar修剪crop_width的寬度。- 參數:
- ar類陣列,階數為 N
輸入陣列。
- crop_width{序列, 整數}
要從每個軸的邊緣移除的值的數量。
((before_1, after_1),…(before_N, after_N))指定每個軸開始和結束時的獨特裁剪寬度。((before, after),) 或 (before, after)指定每個軸的固定開始和結束裁剪。(n,)或整數n的n是所有軸 before = after =n的快捷方式。- copy布林值,可選
如果
True,請確保返回的陣列是連續的副本。通常,裁剪操作將返回底層輸入陣列的不連續視圖。- order{‘C’, ‘F’, ‘A’, ‘K’},可選
如果
copy==True,控制副本的記憶體佈局。請參閱np.copy。
- 回傳:
- cropped陣列
裁剪後的陣列。如果
copy=False(預設),這是輸入陣列的切片視圖。
- skimage.util.dtype_limits(image, clip_negative=False)[原始碼]#
返回影像的 dtype 的強度限制,即 (最小值,最大值) 元組。
- 參數:
- imagendarray
輸入影像。
- clip_negative布林值,可選
如果為 True,即使影像 dtype 允許負值,也會截斷負範圍(即,最小值強度返回 0)。
- 回傳:
- imin, imax元組
較低和較高的強度限制。
- skimage.util.img_as_bool(image, force_copy=False)[原始碼]#
將影像轉換為布林格式。
- 參數:
- imagendarray
輸入影像。
- force_copy布林值,可選
強制複製數據,無論其當前 dtype 為何。
- 回傳:
- out布林值 ndarray (
bool_) 輸出影像。
- out布林值 ndarray (
注意事項
輸入 dtype 正範圍的上半部分為 True,下半部分為 False。所有負值(如果存在)均為 False。
- skimage.util.img_as_float(image, force_copy=False)[原始碼]#
將影像轉換為浮點數格式。
此函數與
img_as_float64相似,但不會將較低精度的浮點陣列轉換為float64。- 參數:
- imagendarray
輸入影像。
- force_copy布林值,可選
強制複製數據,無論其當前 dtype 為何。
- 回傳:
- out浮點數 ndarray
輸出影像。
注意事項
浮點影像的範圍是 [0.0, 1.0] 或 [-1.0, 1.0],分別從無號或帶號數據類型轉換而來。如果輸入影像具有浮點類型,則強度值不會被修改,並且可能超出範圍 [0.0, 1.0] 或 [-1.0, 1.0]。
- skimage.util.img_as_float32(image, force_copy=False)[原始碼]#
將影像轉換為單精度 (32 位元) 浮點數格式。
- 參數:
- imagendarray
輸入影像。
- force_copy布林值,可選
強制複製數據,無論其當前 dtype 為何。
- 回傳:
- outfloat32 的 ndarray
輸出影像。
注意事項
浮點影像的範圍是 [0.0, 1.0] 或 [-1.0, 1.0],分別從無號或帶號數據類型轉換而來。如果輸入影像具有浮點類型,則強度值不會被修改,並且可能超出範圍 [0.0, 1.0] 或 [-1.0, 1.0]。
- skimage.util.img_as_float64(image, force_copy=False)[原始碼]#
將影像轉換為雙精度 (64 位元) 浮點數格式。
- 參數:
- imagendarray
輸入影像。
- force_copy布林值,可選
強制複製數據,無論其當前 dtype 為何。
- 回傳:
- outfloat64 的 ndarray
輸出影像。
注意事項
浮點影像的範圍是 [0.0, 1.0] 或 [-1.0, 1.0],分別從無號或帶號數據類型轉換而來。如果輸入影像具有浮點類型,則強度值不會被修改,並且可能超出範圍 [0.0, 1.0] 或 [-1.0, 1.0]。
- skimage.util.img_as_int(image, force_copy=False)[原始碼]#
將影像轉換為 16 位元有號整數格式。
- 參數:
- imagendarray
輸入影像。
- force_copy布林值,可選
強制複製數據,無論其當前 dtype 為何。
- 回傳:
- outint16 的 ndarray
輸出影像。
注意事項
這些值縮放到 -32768 和 32767 之間。如果輸入數據類型僅為正數(例如,uint8),則輸出影像仍將僅具有正值。
- skimage.util.img_as_ubyte(image, force_copy=False)[原始碼]#
將影像轉換為 8 位元無號整數格式。
- 參數:
- imagendarray
輸入影像。
- force_copy布林值,可選
強制複製數據,無論其當前 dtype 為何。
- 回傳:
- outubyte (uint8) 的 ndarray
輸出影像。
注意事項
負輸入值將被截斷。正值縮放到 0 和 255 之間。
- skimage.util.img_as_uint(image, force_copy=False)[原始碼]#
將影像轉換為 16 位元無號整數格式。
- 參數:
- imagendarray
輸入影像。
- force_copy布林值,可選
強制複製數據,無論其當前 dtype 為何。
- 回傳:
- outuint16 的 ndarray
輸出影像。
注意事項
負輸入值將被截斷。正值縮放到 0 和 65535 之間。
- skimage.util.invert(image, signed_float=False)[原始碼]#
反轉影像。
反轉輸入影像的強度範圍,使 dtype 最大值現在為 dtype 最小值,反之亦然。此操作根據輸入 dtype 略有不同
無號整數:從 dtype 最大值中減去影像
帶號整數:從 -1 中減去影像(請參閱注意事項)
浮點數:從 1 中減去影像(如果 signed_float 為 False,因此我們假設影像是無號的),或從 0 中減去影像(如果 signed_float 為 True)。
請參閱範例以釐清說明。
- 參數:
- imagendarray
輸入影像。
- signed_float布林值,可選
如果為 True 且影像類型為浮點數,則假定範圍為 [-1, 1]。如果為 False 且影像類型為浮點數,則假定範圍為 [0, 1]。
- 回傳:
- invertedndarray
反轉影像。
注意事項
理想情況下,對於帶號整數,我們只需乘以 -1。但是,帶號整數範圍是不對稱的。例如,對於 np.int8,可能值的範圍是 [-128, 127],因此 -128 * -1 等於 -128!通過從 -1 中減去,我們正確地將最大 dtype 值映射到最小值。
範例
>>> img = np.array([[100, 0, 200], ... [ 0, 50, 0], ... [ 30, 0, 255]], np.uint8) >>> invert(img) array([[155, 255, 55], [255, 205, 255], [225, 255, 0]], dtype=uint8) >>> img2 = np.array([[ -2, 0, -128], ... [127, 0, 5]], np.int8) >>> invert(img2) array([[ 1, -1, 127], [-128, -1, -6]], dtype=int8) >>> img3 = np.array([[ 0., 1., 0.5, 0.75]]) >>> invert(img3) array([[1. , 0. , 0.5 , 0.25]]) >>> img4 = np.array([[ 0., 1., -1., -0.25]]) >>> invert(img4, signed_float=True) array([[-0. , -1. , 1. , 0.25]])

- skimage.util.label_points(coords, output_shape)[原始碼]#
為影像遮罩上的座標指定唯一的整數標籤
- 參數:
- coords: ndarray
一個 N 個坐標的陣列,維度為 D
- output_shape: tuple
在
coords上標記的遮罩形狀
- 回傳:
- labels: ndarray
一個包含零的遮罩,在
coords處包含唯一的整數標籤
注意事項
標籤會被賦予轉換為整數且從 0 開始的坐標。
超出遮罩範圍的坐標會引發 IndexError。
負坐標會引發 ValueError
範例
>>> import numpy as np >>> from skimage.util._label import label_points >>> coords = np.array([[0, 1], [2, 2]]) >>> output_shape = (5, 5) >>> mask = label_points(coords, output_shape) >>> mask array([[0, 1, 0, 0, 0], [0, 0, 0, 0, 0], [0, 0, 2, 0, 0], [0, 0, 0, 0, 0], [0, 0, 0, 0, 0]], dtype=uint64)
- skimage.util.lookfor(what)[source]#
在 scikit-image 文件字串上執行關鍵字搜尋並列印結果。
警告
此函數也可能列印出不屬於 scikit-image 公開 API 的結果。
- 參數:
- whatstr
要搜尋的詞語。
範例
>>> import skimage as ski >>> ski.util.lookfor('regular_grid') Search results for 'regular_grid' --------------------------------- skimage.util.regular_grid Find `n_points` regularly spaced along `ar_shape`. skimage.util.lookfor Do a keyword search on scikit-image docstrings and print results.
- skimage.util.map_array(input_arr, input_vals, output_vals, out=None)[source]#
將輸入陣列中的值從 input_vals 映射到 output_vals。
- 參數:
- input_arr整數陣列,形狀為 (M[, …])
輸入的標籤圖像。
- input_vals整數陣列,形狀為 (K,)
要從中對應的值。
- output_vals陣列,形狀為 (K,)
要對應到的值。
- out: 陣列,與 `input_arr` 形狀相同
輸出陣列。如果未提供,將會建立。它應該具有與
output_vals相同的 dtype。
- 回傳:
- out陣列,與
input_arr形狀相同 對應值的陣列。
- out陣列,與
注意事項
如果
input_arr包含input_vals未涵蓋的值,它們將被設定為 0。範例
>>> import numpy as np >>> import skimage as ski >>> ski.util.map_array( ... input_arr=np.array([[0, 2, 2, 0], [3, 4, 5, 0]]), ... input_vals=np.array([1, 2, 3, 4, 6]), ... output_vals=np.array([6, 7, 8, 9, 10]), ... ) array([[0, 7, 7, 0], [8, 9, 0, 0]])
- skimage.util.montage(arr_in, fill='mean', rescale_intensity=False, grid_shape=None, padding_width=0, *, channel_axis=None)[source]#
建立多個單通道或多通道影像的蒙太奇。
從輸入陣列建立一個矩形蒙太奇,該陣列表示一組形狀相同的單通道(灰階)或多通道(彩色)圖像。
例如,使用以下
arr_in呼叫montage(arr_in)1
2
3
將會返回
1
2
3
其中 ‘*’ 補丁將由
fill參數決定。- 參數:
- arr_inndarray,形狀為 (K, M, N[, C])
表示一組
K個形狀相同的圖像的陣列。- fill浮點數或類似浮點數的陣列或 ‘mean’,可選
用於填充輸出陣列中的填充區域和/或額外圖塊的值。對於單通道集合,必須是
float。對於多通道集合,必須是具有通道數量的類陣列。如果為mean,則使用所有圖像的平均值。- rescale_intensity布林值,可選
是否將每個圖像的強度重新縮放到 [0, 1]。
- grid_shape元組,可選
蒙太奇的所需網格形狀
(ntiles_row, ntiles_column)。預設縱橫比為正方形。- padding_width整數,可選
圖塊之間以及圖塊與邊界之間的間距大小。如果非零,則更容易感知個別圖像的邊界。
- channel_axisint 或 None,可選
如果為 None,則假設影像為灰階 (單通道) 影像。否則,此參數會指出陣列的哪個軸對應到通道。
- 回傳:
- arr_out(K*(M+p)+p, K*(N+p)+p[, C]) ndarray
輸出陣列,其中輸入圖像黏在一起(包括填充
p)。
範例
>>> import numpy as np >>> from skimage.util import montage >>> arr_in = np.arange(3 * 2 * 2).reshape(3, 2, 2) >>> arr_in array([[[ 0, 1], [ 2, 3]], [[ 4, 5], [ 6, 7]], [[ 8, 9], [10, 11]]]) >>> arr_out = montage(arr_in) >>> arr_out.shape (4, 4) >>> arr_out array([[ 0, 1, 4, 5], [ 2, 3, 6, 7], [ 8, 9, 5, 5], [10, 11, 5, 5]]) >>> arr_in.mean() 5.5 >>> arr_out_nonsquare = montage(arr_in, grid_shape=(1, 3)) >>> arr_out_nonsquare array([[ 0, 1, 4, 5, 8, 9], [ 2, 3, 6, 7, 10, 11]]) >>> arr_out_nonsquare.shape (2, 6)
- skimage.util.random_noise(image, mode='gaussian', rng=None, clip=True, **kwargs)[source]#
將各種隨機雜訊新增至浮點數影像的函式。
- 參數:
- imagendarray
輸入的圖像資料。將會轉換為浮點數。
- mode字串,可選
以下字串之一,選擇要新增的雜訊類型
- ‘gaussian’(預設)
高斯分佈的加性雜訊。
- ‘localvar’
高斯分佈的加性雜訊,在
image的每個點具有指定的局部變異數。- ‘poisson’
從資料產生的泊松分佈雜訊。
- ‘salt’
將隨機像素替換為 1。
- ‘pepper’
將隨機像素替換為 0(對於無符號圖像)或 -1(對於有符號圖像)。
- ‘s&p’
將隨機像素替換為 1 或
low_val,其中low_val對於無符號圖像為 0,對於有符號圖像為 -1。- ‘speckle’
使用
out = image + n * image的乘性雜訊,其中n是具有指定平均值和變異數的高斯雜訊。
- rng{
numpy.random.Generator,整數},可選 虛擬隨機數產生器。預設情況下,使用 PCG64 產生器(請參閱
numpy.random.default_rng())。如果rng是一個整數,則會用它來設定產生器的種子。- clip布林值,可選
如果為 True(預設),則在套用雜訊後,將會針對模式
'speckle'、'poisson'和'gaussian'剪切輸出。這是維持正確圖像資料範圍所需要的。如果為 False,則不會套用剪切,並且輸出可能會超出範圍 [-1, 1]。- mean浮點數,可選
隨機分佈的平均值。用於 ‘gaussian’ 和 ‘speckle’。預設值:0。
- var浮點數,可選
隨機分佈的變異數。用於 ‘gaussian’ 和 ‘speckle’。注意:變異數 = (標準差) ** 2。預設值:0.01
- local_varsndarray,可選
正浮點數的陣列,形狀與
image相同,定義每個影像點的局部變異數。用於 ‘localvar’。- amount浮點數,可選
要替換為範圍 [0, 1] 上的雜訊的影像像素比例。用於 ‘salt’、‘pepper’ 和 ‘salt & pepper’。預設值:0.05
- salt_vs_pepper浮點數,可選
用於 ‘s&p’ 的鹽和胡椒雜訊的比例,範圍為 [0, 1]。較高的值表示更多的鹽。預設值:0.5(等量)
- 回傳:
- outndarray
範圍為 [0, 1] 或 [-1, 1] 的輸出浮點數圖像資料,取決於輸入的
image是無符號還是有符號。
注意事項
斑點、泊松、局部變異數和高斯雜訊可能會產生超出有效影像範圍的雜訊。預設值是剪切(非別名)這些值,但可以透過設定
clip=False來保留它們。請注意,在這種情況下,輸出可能會包含超出範圍 [0, 1] 或 [-1, 1] 的值。請謹慎使用此選項。由於中間計算中普遍存在完全正的浮點數圖像,因此無法僅根據 dtype 來判斷輸入是否為有符號。相反地,會明確搜尋負值。只有在找到負值時,此函數才會假定為有符號輸入。只有在罕見且暴露不良的情況下才會發生意外結果(例如,如果有符號
image中的所有值都高於 50% 灰色)。在這種情況下,手動將輸入縮放到正域將會解決問題。泊松分佈僅針對正整數定義。為了應用此雜訊類型,會先找出影像中唯一值的數量,並使用最接近的 2 的次方值來放大浮點數結果,之後再將其縮放回浮點數影像範圍。
為了針對帶正負號的影像產生泊松雜訊,會先將帶正負號的影像暫時轉換為浮點數域中的不帶正負號的影像,產生泊松雜訊,然後再將其返回原始範圍。
- skimage.util.regular_grid(ar_shape, n_points)[原始碼]#
尋找沿著
ar_shape均勻間隔的n_points個點。傳回的點(以切片形式)應盡可能接近立方體間隔。本質上,這些點之間的間隔為輸入陣列大小的 N 次方根,其中 N 是維度數。但是,如果陣列維度無法容納完整的步長,則會將其「捨棄」,而僅針對剩餘的維度執行計算。
- 參數:
- ar_shape類似陣列的整數
嵌入網格的空間形狀。
len(ar_shape)是維度數。- n_points整數
要嵌入空間中的(近似)點數。
- 回傳:
- slices切片物件的元組
沿著
ar_shape的每個維度的切片,使得所有切片的交集給出規則間隔點的座標。版本 0.14.1 變更:在 scikit-image 0.14.1 和 0.15 中,傳回類型從列表變更為元組,以確保與 Numpy 1.15 及更高版本的相容性。如果您的程式碼要求傳回的結果為列表,則可以使用以下命令將此函式的輸出轉換為列表:
>>> result = list(regular_grid(ar_shape=(3, 20, 40), n_points=8))
範例
>>> ar = np.zeros((20, 40)) >>> g = regular_grid(ar.shape, 8) >>> g (slice(5, None, 10), slice(5, None, 10)) >>> ar[g] = 1 >>> ar.sum() 8.0 >>> ar = np.zeros((20, 40)) >>> g = regular_grid(ar.shape, 32) >>> g (slice(2, None, 5), slice(2, None, 5)) >>> ar[g] = 1 >>> ar.sum() 32.0 >>> ar = np.zeros((3, 20, 40)) >>> g = regular_grid(ar.shape, 8) >>> g (slice(1, None, 3), slice(5, None, 10), slice(5, None, 10)) >>> ar[g] = 1 >>> ar.sum() 8.0
- skimage.util.regular_seeds(ar_shape, n_points, dtype=<class 'int'>)[原始碼]#
回傳一個具有約 `n_points` 個均勻間隔非零像素的影像。
- 參數:
- ar_shape整數元組
所需輸出影像的形狀。
- n_points整數
所需的非零點數。
- dtypenumpy 資料類型,可選
所需輸出的資料類型。
- 回傳:
- seed_img整數或布林值陣列
所需的影像。
範例
>>> regular_seeds((5, 5), 4) array([[0, 0, 0, 0, 0], [0, 1, 0, 2, 0], [0, 0, 0, 0, 0], [0, 3, 0, 4, 0], [0, 0, 0, 0, 0]])
- skimage.util.slice_along_axes(image, slices, axes=None, copy=False)[原始碼]#
沿著給定軸切割影像。
- 參數:
- imagendarray
輸入影像。
- slices2 元組 (a, b) 的列表,其中 a < b。
對於
axes中的每個軸,都有對應的 2 元組(min_val, max_val)可用於切片(與 Python 切片一樣,max_val不包含在內)。- axes整數或元組,可選
與
slices中給定的限制相對應的軸。如果為 None,則軸按升序排列,直到slices的長度。- copy布林值,可選
如果為 True,則確保輸出不是
image的視圖。
- 回傳:
- outndarray
image中對應於給定切片和軸的區域。
範例
>>> from skimage import data >>> img = data.camera() >>> img.shape (512, 512) >>> cropped_img = slice_along_axes(img, [(0, 100)]) >>> cropped_img.shape (100, 512) >>> cropped_img = slice_along_axes(img, [(0, 100), (0, 100)]) >>> cropped_img.shape (100, 100) >>> cropped_img = slice_along_axes(img, [(0, 100), (0, 75)], axes=[1, 0]) >>> cropped_img.shape (75, 100)
- skimage.util.unique_rows(ar)[原始碼]#
從二維陣列中移除重複的列。
特別是,如果給定一個形狀為 (Npoints, Ndim) 的座標陣列,它將移除重複的點。
- 參數:
- arndarray,形狀 (M, N)
輸入陣列。
- 回傳:
- ar_outndarray,形狀 (P, N)
輸入陣列的副本,已移除重複的列。
- 引發:
- ValueError如果
ar不是二維的。
- ValueError如果
注意事項
如果
ar不是 C 連續的,則函式會產生其副本,這會對大型輸入陣列的效能產生負面影響。範例
>>> ar = np.array([[1, 0, 1], ... [0, 1, 0], ... [1, 0, 1]], np.uint8) >>> unique_rows(ar) array([[0, 1, 0], [1, 0, 1]], dtype=uint8)
- skimage.util.view_as_blocks(arr_in, block_shape)[原始碼]#
輸入 n 維陣列的區塊檢視 (使用重新跨步)。
區塊是輸入陣列的非重疊視圖。
- 參數:
- arr_inndarray,形狀 (M[, …])
輸入陣列。
- block_shape元組
區塊的形狀。每個維度都必須能均勻地除以
arr_in的相應維度。
- 回傳:
- arr_outndarray
輸入陣列的區塊視圖。
範例
>>> import numpy as np >>> from skimage.util.shape import view_as_blocks >>> A = np.arange(4*4).reshape(4,4) >>> A array([[ 0, 1, 2, 3], [ 4, 5, 6, 7], [ 8, 9, 10, 11], [12, 13, 14, 15]]) >>> B = view_as_blocks(A, block_shape=(2, 2)) >>> B[0, 0] array([[0, 1], [4, 5]]) >>> B[0, 1] array([[2, 3], [6, 7]]) >>> B[1, 0, 1, 1] 13
>>> A = np.arange(4*4*6).reshape(4,4,6) >>> A array([[[ 0, 1, 2, 3, 4, 5], [ 6, 7, 8, 9, 10, 11], [12, 13, 14, 15, 16, 17], [18, 19, 20, 21, 22, 23]], [[24, 25, 26, 27, 28, 29], [30, 31, 32, 33, 34, 35], [36, 37, 38, 39, 40, 41], [42, 43, 44, 45, 46, 47]], [[48, 49, 50, 51, 52, 53], [54, 55, 56, 57, 58, 59], [60, 61, 62, 63, 64, 65], [66, 67, 68, 69, 70, 71]], [[72, 73, 74, 75, 76, 77], [78, 79, 80, 81, 82, 83], [84, 85, 86, 87, 88, 89], [90, 91, 92, 93, 94, 95]]]) >>> B = view_as_blocks(A, block_shape=(1, 2, 2)) >>> B.shape (4, 2, 3, 1, 2, 2) >>> B[2:, 0, 2] array([[[[52, 53], [58, 59]]], [[[76, 77], [82, 83]]]])

- skimage.util.view_as_windows(arr_in, window_shape, step=1)[原始碼]#
輸入 n 維陣列的滾動視窗檢視。
視窗是輸入陣列的重疊視圖,相鄰的視窗會偏移單行或單欄(或更高維度的索引)。
- 參數:
- arr_inndarray,形狀 (M[, …])
輸入陣列。
- window_shape整數或長度為 arr_in.ndim 的元組
定義滾動視窗視圖的基本 n 維正交體(更廣為人知的名稱是超矩形 [1])的形狀。如果給定整數,則該形狀將是邊長由其值給定的超立方體。
- step整數或長度為 arr_in.ndim 的元組
指出執行擷取時的步長。如果給定整數,則步長在所有維度中都是統一的。
- 回傳:
- arr_outndarray
輸入陣列的(滾動)視窗視圖。
注意事項
當涉及到記憶體使用時,應非常小心滾動視圖。事實上,雖然「視圖」的記憶體使用量與其基本陣列相同,但當在計算中使用此「視圖」時,所出現的實際陣列通常比原始陣列大得多(尤其是對於二維及更高維度的陣列)。
例如,讓我們考慮一個大小為 (100, 100, 100) 的
float64三維陣列。此陣列需要約 8*100**3 位元組的儲存空間,僅為 8 MB。如果決定使用 (3, 3, 3) 的視窗在此陣列上建立滾動視圖,則滾動視圖的假設大小(如果將視圖重新塑形)將約為 8*(100-3+1)**3*3**3,約為 203 MB!隨著輸入陣列的維度變大,縮放情況會變得更糟。參考文獻
範例
>>> import numpy as np >>> from skimage.util.shape import view_as_windows >>> A = np.arange(4*4).reshape(4,4) >>> A array([[ 0, 1, 2, 3], [ 4, 5, 6, 7], [ 8, 9, 10, 11], [12, 13, 14, 15]]) >>> window_shape = (2, 2) >>> B = view_as_windows(A, window_shape) >>> B[0, 0] array([[0, 1], [4, 5]]) >>> B[0, 1] array([[1, 2], [5, 6]])
>>> A = np.arange(10) >>> A array([0, 1, 2, 3, 4, 5, 6, 7, 8, 9]) >>> window_shape = (3,) >>> B = view_as_windows(A, window_shape) >>> B.shape (8, 3) >>> B array([[0, 1, 2], [1, 2, 3], [2, 3, 4], [3, 4, 5], [4, 5, 6], [5, 6, 7], [6, 7, 8], [7, 8, 9]])
>>> A = np.arange(5*4).reshape(5, 4) >>> A array([[ 0, 1, 2, 3], [ 4, 5, 6, 7], [ 8, 9, 10, 11], [12, 13, 14, 15], [16, 17, 18, 19]]) >>> window_shape = (4, 3) >>> B = view_as_windows(A, window_shape) >>> B.shape (2, 2, 4, 3) >>> B array([[[[ 0, 1, 2], [ 4, 5, 6], [ 8, 9, 10], [12, 13, 14]], [[ 1, 2, 3], [ 5, 6, 7], [ 9, 10, 11], [13, 14, 15]]], [[[ 4, 5, 6], [ 8, 9, 10], [12, 13, 14], [16, 17, 18]], [[ 5, 6, 7], [ 9, 10, 11], [13, 14, 15], [17, 18, 19]]]])