注意
跳至結尾以下載完整的範例程式碼。或透過 Binder 在您的瀏覽器中執行此範例
形狀索引#
形狀索引是局部曲率的單一數值度量,從黑塞矩陣的特徵值導出,由 Koenderink & van Doorn 定義 [1]。
它可用於根據結構的明顯局部形狀尋找結構。
形狀索引映射到 -1 到 1 的值,代表不同種類的形狀(詳情請參閱文件)。
在此範例中,會產生帶有斑點的隨機影像,應該偵測這些斑點。
形狀索引 1 代表「球形帽」,也就是我們要偵測的斑點形狀。
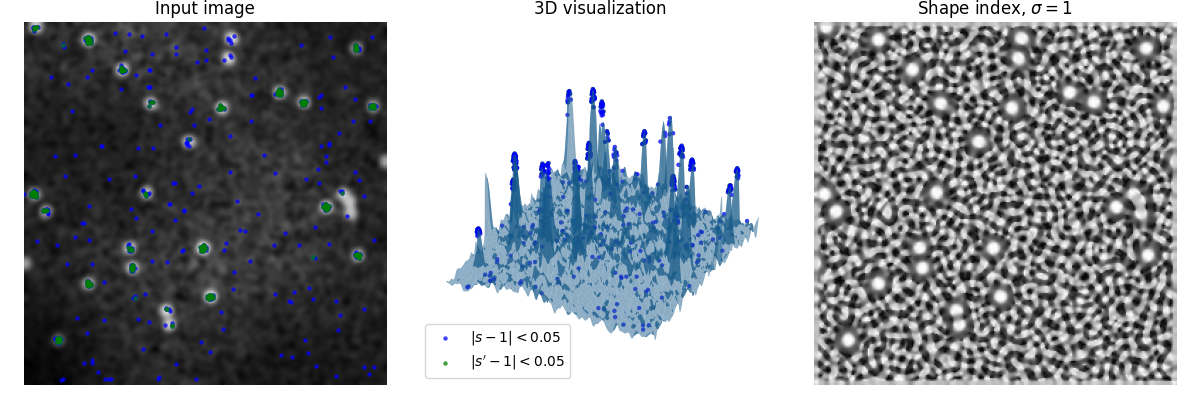
最左邊的圖顯示產生的影像,中間顯示影像的 3D 渲染,將強度值作為 3D 表面的高度,右邊的圖顯示形狀索引 (s)。
如可見,形狀索引也很容易放大雜訊的局部形狀,但不受整體現象(例如,不均勻照明)的影響。
藍色和綠色標記是偏離所需形狀不超過 0.05 的點。為了衰減訊號中的雜訊,綠色標記取自經過另一次高斯模糊處理後(產生 s')的形狀索引 (s)。
請注意,太過緊密連接的斑點不會被偵測到,因為它們不具備所需的形狀。
import numpy as np
import matplotlib.pyplot as plt
from scipy import ndimage as ndi
from skimage.feature import shape_index
from skimage.draw import disk
def create_test_image(image_size=256, spot_count=30, spot_radius=5, cloud_noise_size=4):
"""
Generate a test image with random noise, uneven illumination and spots.
"""
rng = np.random.default_rng()
image = rng.normal(loc=0.25, scale=0.25, size=(image_size, image_size))
for _ in range(spot_count):
rr, cc = disk(
(rng.integers(image.shape[0]), rng.integers(image.shape[1])),
spot_radius,
shape=image.shape,
)
image[rr, cc] = 1
image *= rng.normal(loc=1.0, scale=0.1, size=image.shape)
image *= ndi.zoom(
rng.normal(loc=1.0, scale=0.5, size=(cloud_noise_size, cloud_noise_size)),
image_size / cloud_noise_size,
)
return ndi.gaussian_filter(image, sigma=2.0)
# First create the test image and its shape index
image = create_test_image()
s = shape_index(image)
# In this example we want to detect 'spherical caps',
# so we threshold the shape index map to
# find points which are 'spherical caps' (~1)
target = 1
delta = 0.05
point_y, point_x = np.where(np.abs(s - target) < delta)
point_z = image[point_y, point_x]
# The shape index map relentlessly produces the shape, even that of noise.
# In order to reduce the impact of noise, we apply a Gaussian filter to it,
# and show the results once in
s_smooth = ndi.gaussian_filter(s, sigma=0.5)
point_y_s, point_x_s = np.where(np.abs(s_smooth - target) < delta)
point_z_s = image[point_y_s, point_x_s]
fig = plt.figure(figsize=(12, 4))
ax1 = fig.add_subplot(1, 3, 1)
ax1.imshow(image, cmap=plt.cm.gray)
ax1.axis('off')
ax1.set_title('Input image')
scatter_settings = dict(alpha=0.75, s=10, linewidths=0)
ax1.scatter(point_x, point_y, color='blue', **scatter_settings)
ax1.scatter(point_x_s, point_y_s, color='green', **scatter_settings)
ax2 = fig.add_subplot(1, 3, 2, projection='3d', sharex=ax1, sharey=ax1)
x, y = np.meshgrid(np.arange(0, image.shape[0], 1), np.arange(0, image.shape[1], 1))
ax2.plot_surface(x, y, image, linewidth=0, alpha=0.5)
ax2.scatter(
point_x, point_y, point_z, color='blue', label='$|s - 1|<0.05$', **scatter_settings
)
ax2.scatter(
point_x_s,
point_y_s,
point_z_s,
color='green',
label='$|s\' - 1|<0.05$',
**scatter_settings,
)
ax2.legend(loc='lower left')
ax2.axis('off')
ax2.set_title('3D visualization')
ax3 = fig.add_subplot(1, 3, 3, sharex=ax1, sharey=ax1)
ax3.imshow(s, cmap=plt.cm.gray)
ax3.axis('off')
ax3.set_title(r'Shape index, $\sigma=1$')
fig.tight_layout()
plt.show()
腳本總執行時間: (0 分鐘 1.457 秒)